Se trata de un proyecto desarrollado durante el año 2020 bajo el contexto del Fondo concursable de Innovación para el aprendizaje práctico remoto de la Vicerrectoría Académica.
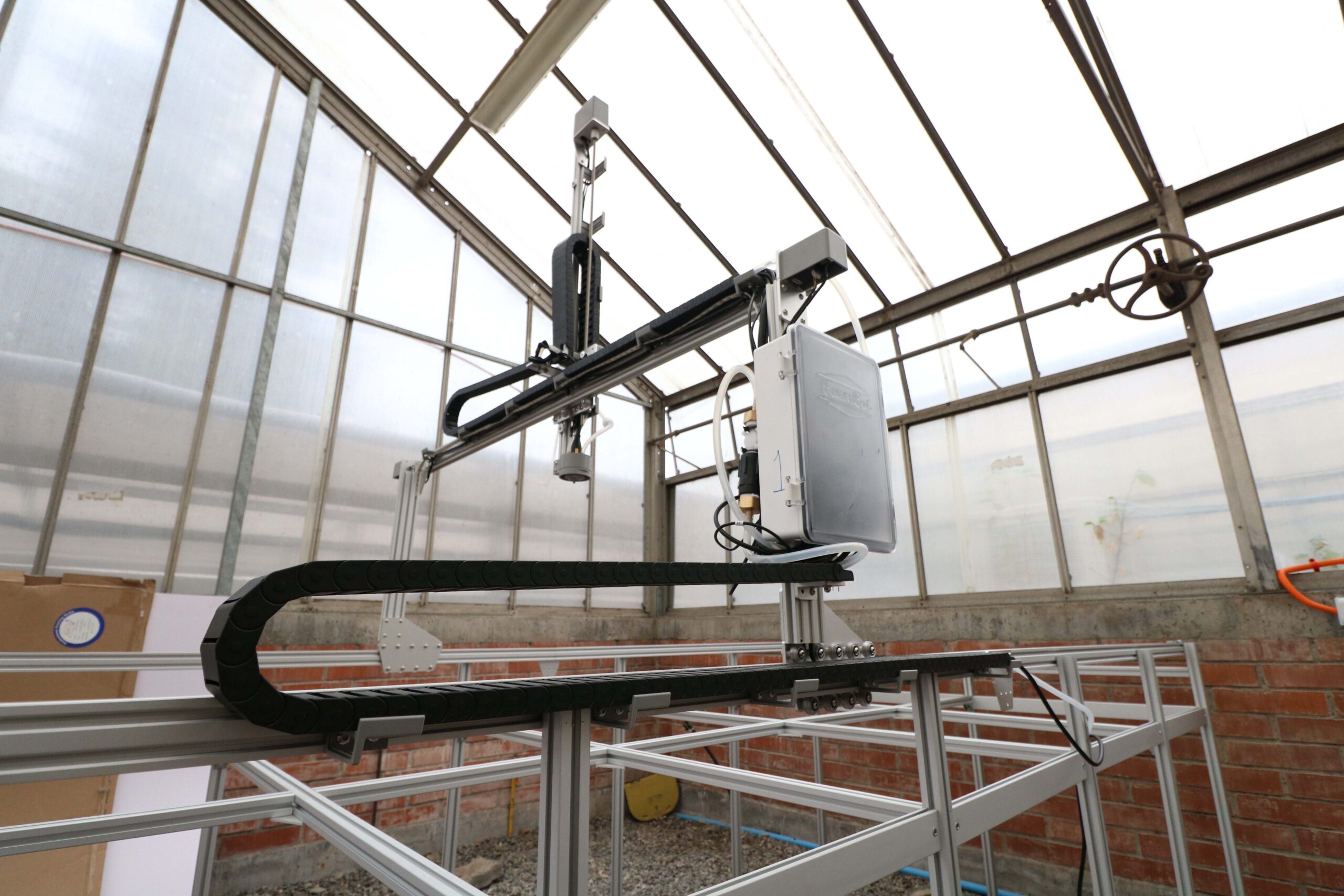
photo_camera En la imagen se muestra la nave de sistema de robótico de riego a distancia.
Este proyecto, coordinado por el docente Yordi Norero, surge a raíz de una necesidad dada por el contexto de emergencia sanitaria del año 2020. Para la formación de los futuros ingenieros agrónomos y forestales es fundamental aplicar y complementar los conceptos teóricos vistos en clases con diversas actividades prácticas realizadas en laboratorio o terreno. Sin embargo, debido a las medidas sanitarias, todas las actividades prácticas se vieron suspendidas.
El proyecto Tele-Soil consiste en acondicionar una nave de invernadero con la finalidad de monitorear y facilitar la interacción del estudiantado con las plantas establecidas en su interior. Esto se realizará mediante la instalación de un sistema de brazos robóticos y equipos de sensorización integrados a las camas de cultivo. Mediante este sistema, el estudiantado logrará no solo recopilar información relevante para la toma de decisiones de manejo de las especies vegetales, sino que además tendrán la oportunidad de realizar actividades prácticas tales como la siembra, riego, fertilización y control de plagas y enfermedades, que no podían ser realizadas presencialmente. Gracias a este proyecto, dichas actividades pudieron ser ejecutadas mediante comandos simples desde los teléfonos celulares del estudiantado.
Además, la implementación de esta nave con un sistema robótico permitió incorporar tecnología que ya se utiliza en universidades del mundo pioneras en estos sistemas. Esta tendencia es relevante para la formación de los Agrónomos y Forestales del futuro, ya que les permitió comenzar a familiarizarse con la robótica asociada a sistemas de cultivo intensivo.

Se acondicionó una nave de invernadero equipado con sistemas
robóticos y sensores medioambientales con la finalidad de manipular y
monitorizar, de forma remota, experimentos de campo como si se realizarán
presencialmente, pero desde la seguridad del hogar y pudiendo ser ejecutadas
mediante una Web App, desde sus celulares o PC.
Las etapas del proyecto fueron:
La siembra fue realizada de forma remota, así como también, los manejos y adquisición de datos durante los dos meses que duró la actividad. Los datos fueron subidos y compartidos a una carpeta de drive donde, estudiantes y profesores, pudieron acceder a la información recopilada por los robots y sensores.
Además, gracias a la cámara de los robots se capturaron, automáticamente y gracias a una secuencia preprogramada, fotos de cada una de las plantas y en cada etapa de desarrollo del cultivo. Estos datos generaron valiosa información que fue utilizada en los cursos para aplicar y complementar la materia vista en clases.
Si bien los robots y sensores lograron operar de forma adecuada y los sensores capturar información la gran mayoría de las veces, durante el semestre, resultó ser una fuerte limitación la comunicación remota de los equipos. Debido a temas de ciberseguridad no fue posible conectar los equipos a la red fija del Campus y se resolvió contratando un plan fijo con un proveedor externo para el suministro de internet.
Con respecto a la utilización de los equipos por parte de los profesores hubo cierta reticencia o preocupación en dejar los robots para que puedan ser operados directamente por el estudiantado, debido a que pensaban que podrían ser afectados por una mala o irresponsable operación.
Por último, se pudo constatar la enorme robustez de los robots y calidad de sus componentes. Se pusieron a prueba con excelentes resultados los sistemas de autobloqueo y de seguridad con los que cuenta cada “Farmbot” para poder evitar desperfectos y accidentes (choques con las plantas, forzado de motores, resistencia de los implementos y herramientas).